-
그린 정리
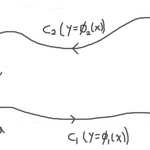
\(D \subseteq \mathbb{R}^2 \)가 simple region이고 \(C=\partial D \)일 때, 미분 가능하고 미분했을 때 연속인 함수 \(P:D \rightarrow \mathbb{R}\)와 \(Q:D \rightarrow \mathbb{R} \)에 대해\[ \int _{C^+} P dx + Q dy = \iint _D \left( \frac { \partial Q } {\partial x} - \frac { \partial P} {\partial y} \right) dx dy \]가 성립한다. 이 때 \(C^+\)는 반시계방향의 \(C\)를 의미한다.2차원 평면에서 경계를 따라 적분한 결과와 영역 전체에서 적분한 결과 사이의 관계를 보여주는 식입니다.Simple Region..
수학/미적분학
2018. 6. 17. 20:02 -
자기 자신을 원소로 가지는 집합이 있을까?
Suppose that set \(A\) satisfying \( A \in A\) exists.Then \( \{A\} \subseteq A\).Since \(\{A\}\) is set, there is an element \(a \in \{A\}\) such that \( a \cap \{A\}= \emptyset \). (Axiom of Foundation)\(a \in \{A\}\) implies \(a = A\).Therefore \( A \cap \{A\} = A = \emptyset\)But \(A \in A \cap \{A\}\) since \(A \in A\) and \(A \in \{A\}\), deriving contradiction. To prove a class not exists..
수학/집합론
2018. 4. 18. 09:09 -
Law of Conservation of Energy
Theorem. Let \(\vec{c} (t)\) as a position of the particle of mass \(m\) at time \(t\). Let \(V : \mathbb {R}^3 \rightarrow \mathbb{R}\) as a potential function, having \( - \nabla V \) as a force field. Then \[\frac 1 2 m \| \vec{c}'(t) \|^2 + V( \vec{c}(t))\] is constant. proof. Let above equation as \( E(t)\), and set our aim as showing \(E'(t) = 0 \). Thereby approaching \(V(\vec{c}(t) )\) f..
수학/미적분학
2018. 4. 16. 21:54 -
q-series and Finite Continued Fraction
For \(n \in \mathbb{N} \),\[ \begin{align*} \mu &:= \mu _n (a,q) := \sum _{k=0} ^{ [(n+1)/2] } \frac { (q)_{n-k+1} a^k q^{k^2} }{ (q)_k (q)_{n-2k+1} } \\ \nu &:= \nu _n (a,q) := \sum _{k=0} ^{[n/2]} \frac { (q)_{n-k} a^k q^{k(k+1)} }{(q)_k (q)_{n-2k} } \end{align*} \]Then\[ \newcommand{\surplus}{\mathbin{\genfrac{}{}{0pt}{}{}{+}}} \frac \mu \nu = 1+ \frac {aq} 1 \surplus \frac {aq^2} 1 \surplus ..
수학
2018. 2. 28. 15:19 -
Recurrence Relation On Continued Fraction
Continued fraction is the fraction of the next form.\[ \newcommand{\surplus}{\mathbin{\genfrac{}{}{0pt}{}{}{+}}} Q_n = a_0 + \dfrac{b_1}{a_1 + \dfrac{b_2 }{a_2 + \dfrac{\ddots }{\ddots \dfrac{b_{n-1}}{a_{n-1} + \dfrac{b_n}{a_n} } }}} = a_0 + \mathop{\vcenter{\Large\mathrm{K}}}_{i=1}^{n} \frac{b_i}{a_i} = a_0 + \frac {b_1}{a_1} \surplus \frac {b_2}{a_2} \surplus \cdots \surplus \frac {b_n}{a_n} \..
수학
2018. 2. 27. 11:17 -
멈춤 문제
힐베르트가 수학에서 기계적으로 모든 참인 명제를 찾아낼 수 있는 무모순적인 공리계를 찾으려고 했었고(힐베르트 프로그램), 괴델이 그것을 반증했다(불완전성의 정리). 괴델 이후 튜링은 그 '기계적인 방식'을 튜링기계를 통해서 정의하고 모든 참인 명제를 만드는 튜링기계는 없다는 것을 증명해낸다.멈춤 문제는 그 증명의 열쇠 역할을 한다. 어떤 기계가 멈출지 멈추지 않을지 판단하는 기계가 존재하는가? 모든 참인 명제를 차례로 만들어낼 수 있는 튜링기계 \(A\)가 있다면, 이 기계는 충분히 강력해서 멈출 것인지 판별할 기계 \(M\)을 입력으로 받아 언젠가는 '\(M\)은 멈춘다' 또는 '\(M\)은 멈추지 않는다'라는 명제를 도출해낸다. 즉, \(A\)가 있으면 멈춤 판별을 하는 기계 \(H\)도 존재한다. ..
수학
2018. 1. 15. 17:20 -
유한차분법(1차원)수학/미적분학
2017. 12. 8. 17:33 -
Degree Sequence
어떤 그래프 \(G\) 의 degree sequence는 각 점의 degree로 이루어지는 non-decreasing sequence이다. 즉, 이 sequence의 길이는 그래프의 꼭짓점의 수 \(V(G)\)가 된다. 분명 임의의 그래프가 주어졌을 때 degree sequence를 결정할 수 있지만, degree sequence에서 대응되는 그래프가 하나, 즉 대응되는 그래프가 모두 isomorphic 한지는 조금 생각해볼 문제이다. 이후 증명에서 나오겠지만 대응되는 그래프는 일반적으로 많이 나타난다.그 전에, degree sequence에서 그래프가 대응되는가도 확실하지 않다. 예를 들어 (1,1,1,1,1)은 대응되는 그래프가 존재하지 않는다.\[ \sum _{v \in V} \deg (v) = 2..
수학/그래프 이론
2017. 12. 8. 11:15 -
곡률
곡선 \(C\)의 벡터 함수 \(\mathbb{r} (t)\), 단위 접선 벡터 함수 \(\mathbb{T}(t)\), 길이 함수 \(s(t)\)에 대해 곡률 \(\kappa\)는 다음과 같이 정의된다.\[ \kappa (t) = \Big| \frac {d\mathbb{T}}{ds} \Big| \]즉, 단위 길이 당 접선 벡터가 얼마나 변하는 지를 보는 함수이다. 곡률이 높다면 방향이 작은 구간에서 급격하게 변한다는 보편적인 정의와 상통한다.계산을 할 때는 \(\mathbb{T}\)를 \(s\)에 관해 나타내준 후 미분을 해야 하는데, 매개변수를 써서 다시 나타내면 더 쉽게 할 수 있다.\[ \kappa(t) = \Big| \frac {d\mathbb{T}}{ds} \Big| = \Big| \frac {..
수학/미적분학
2017. 12. 8. 10:30 -
실계수 사차방정식의 일반적 해법
Problem. How to solve \(a x^4 + bx^3 + cx^2 + dx + e = 0, \quad a,b,c,d \in \mathbb{R} \) ? solution. 실계수 삼차방정식을 풀 수 있다는 가정 하에 실계수 사차방정식을 풀 수 있습니다. \[x^4 + \frac b a x^3 + \frac c a x^2 + \frac d a x + \frac e a =0 \]\[ \Big(x + \frac {b}{4a} \Big)^4 = x^4 + \frac {b}{a} x^3 + \text{some 2nd degree polynomial} \]따라서 \(y = x+ \frac b {4a}\)라는 치환을 이용한다면 일반적인 사차방정식 문제를 삼차항이 소거된 형태로 바꿀 수 있습니다.\[ y^4..
수학/기초수학
2017. 10. 24. 11:07